Technologies and Applications of Soft Robotics: A Review
Jyoti Joshi*, Avi Raj Manral and Pushpendra Kumar
Department of Mechanical Engineering, Graphic Era (Deemed to be University), Dehradun 248002, Uttarakhand, India
E-mail: jyotijoshi.qar@geu.ac.in; aviraj.me@geu.ac.in; kumar.pushpendra@geu.ac.in
*Corresponding Author
Received 20 April 2023; Accepted 03 October 2023; Publication 16 October 2023
Abstract
A soft robot is a type of continuum robot that is made of a soft material. Soft robots show infinite degrees of freedom that enable them to track complicated paths. The advantages of soft robotics include high safety, minimal maintenance cost, and robust adaptability to the unstructured environment. Therefore, they can be used for applications in various fields such as industrial, defense, medical, and exploration. This paper discusses about the various existing technologies used in development soft robots. The paper mainly focuses on the design, manufacturing, actuation, and sensing aspects of soft robotics. A review on these aspects of soft robotics is presented along with applications.
Keywords: Soft robotics, soft actuators, soft sensors, soft robot applications.
1 Introduction
In every industry, robots are used to perform various tasks, such as cleaning and assembling parts. They are commonly used to replace manual labor in order to improve the efficiency of production lines. Some of the fields that are commonly using robots include agriculture, healthcare, aviation, and food production. Today’s robots are made of hard structural elements. The development of soft robots, which are capable of performing different tasks without requiring a mechanical system, has the potential to provide fresh solutions to problems that are typically encountered with rigid robots [1]. Unlike rigid joints, soft robots do not require a mechanical system to perform their tasks, however their development require non-traditional fabrication and control [2]. Soft robots can conform to any surface without causing damage. Moreover, they provide safer interaction to human [3]. This field of study is a growing area of research that involves the study of various aspects of manufacturing including electronics, materials, and mechanics [4]. Unlike rigid-body robots, which have a finite number of joints, soft robots are made from flexible materials such as rubber and silicon. They are widely used in various industries due to their versatility and ability to perform different tasks in limited space. Due to their ability to mimic the human body, soft robots are often sought after in multiple applications to aid human operators.
In medical field, soft robots are known to have unique features, such as their ability to distribute forces evenly across multiple areas of contact. This feature helps prevent them from getting damaged due to high force concentrations. Unlike rigid robots, soft robots are safe to interact with and interface with humans due to their compliant nature. One of the main advantages of soft robots is their ability to adapt to various stimuli, which makes them ideal for use in environments that are not designed for rigid robots. Due to the unique working conditions and environment of soft robots, they require different manufacturing methods. With the advent of additive manufacturing technology and the ease of design and fabrication [5, 6], it became possible to create soft robots with different soft materials. This article discusses about the various materials that are used for making these robots.
Despite the advantages of soft robots, they have many shortcomings. For instance, they are not capable of handling heavy loads and are prone to experiencing issues with repetitive motion. They also pose challenges in developing systems that can precisely control their actions due to their near-infinite freedom. Another issue with soft robots is their difficulty in modelling the mechanical behavior [7, 8]. Traditional robots are typically modelled as components that are connected to discrete joints. Due to the flexible materials used in soft robots, it is difficult to model their behavior. This makes it important to develop robust and accurate numerical and mathematical models to improve the design of these machines [9]. The flexible materials used in soft robots also make it difficult to model their behavior. For instance, they can cause uneven or unpredictable changes in their weight. This is because they rely on their intrinsic properties to respond to their environment [10]. Despite the numerous advantages of soft robots, there are still many challenges that need to be solved in order to improve their functionality and control. Soft robots are mainly developed to mimic behavior of living organisms also called bio-inspired or bionic mechanisms such as fish, turtle, octopus, etc. [11]. In recent years, researchers have been working on developing new materials, manufacturing and actuation methods that can be used to improve the performance of these soft mechanisms. Soft robotics is the future of robotics because of their compliant muscles inspired from nature creatures, which can perform complex tasks in confined spaces like a living organism can. This is the main motivation for carrying out this review work to have an overview of advances in area of soft robotics. The present paper discusses about the existing works for soft robots’ design, manufacturing, actuation, sensing and applications.
2 Design
The goal of soft robotics is to develop robots that are physically flexible, and electronics based for their control. They can be used to manipulate and grab delicate objects. For instance, rigid-bodied arms can be equipped with soft end-effectors to deal with delicate objects. Although the area of soft robotics is focused on machines that are completely soft, hence their designs are only suitable for low payloads. But there are still plenty of potential applications for these robots. One of the main advantages of soft robots is their ability to move into places that rigid bodies cannot. This allows them to perform various tasks in disaster relief situations. In addition, they are out of the harm for human interactivity and can be deployed internally to a human anatomy [12]. The environment is also known to inspire the design of soft robots. For instance, animals are known to use their soft components to efficiently move through complex environments [3, 13]. Due to their soft characteristics, soft robots are often designed as a type of creature that looks like familiar creatures, such as octopuses and fish. In Figure 1, different soft robots are shown from semi-soft to completely soft. From Figures 1a–h, respectively; an Arthrobot is inspired by the spider movement (Figure 1a) [14], a soft hand-shaking robot is developed using 3D printing [15], a robotic gripper with variable stiffness is shown [16], a vacuum driven light weight soft gripper is developed based on concept of origami [17], a soft somatosensitive actuators is developed using 3D printing [18], soft robot for fingers rehabilitation is shown for medical application [19], an octopus robot is made from soft material with fluidic actuation [20], and a squishy octopus called Octobot is a completely soft robot made from silicon rubber [21]. Unfortunately, it is very challenging to physically compose and command these types of robots due to their low mechanical hindrance. Due to the limitations of traditional design methods, soft robots are often produced with the help of automated non-traditional machines and methods. These tools allow them to be programmed and designed to perform specific tasks automatically. For instance, by combining the various properties of a soft robot’s shape and material properties (complex shapes using soft materials), it can be designed and controlled to perform a given complex task [2]. Some factors that affect the robots design and feasibility are fatigue and brittle failure.
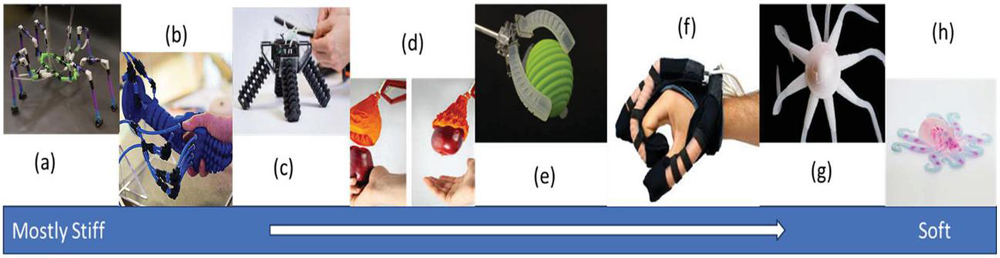
Figure 1 Various soft robots designs.
2.1 Fatigue Failure by Excessive Flexing
For most soft robots, the cyclic loading that they experience while performing a given task can lead to significant performance issues. For instance, if a lamprey-like creature is designed to move, it would need to be able to ignite gas and electrolyze water to propel itself forward. The cyclic loading experienced by a soft robot while performing a given task can lead to significant performance issues [22]. The crawling movement of a soft robot can lead to fatigue failure due to cyclic loading [23, 24]. In addition to choosing a material that is designed to minimize the effects of the cyclic loading, it also needs to be carefully designed to avoid fatigue-cracks. One of the most key factors that one should consider when it comes to designing a soft robot is the fatigue limit of the material. This can be achieved by choosing a material that has a stress-amplitude frequency that is above the frequency of the polymer’s fatigue response.
2.2 Brittle Failure by Temperature
Another principal factor that one should consider is the temperature effects of the material. Feverish temperatures and room temperatures can prevent the stress in one area from spreading to other parts of the material. However, when a material goes through a transition temperature, which is below a certain temperature, it will not be able to revert in a ductile approach. This means that shattering is more likely due to the lack of thermal energy [25]. Polymeric materials are known to turn out to be fragile at lower temperatures, which is why it is very important that the design of soft robots is conducted properly. This issue can be caused by the cooling down of the transition temperature, which is different from what one might expect. In space stations, the temperature is extremely low and that can freeze the fluids in soft robots, which should be considered in design [26].
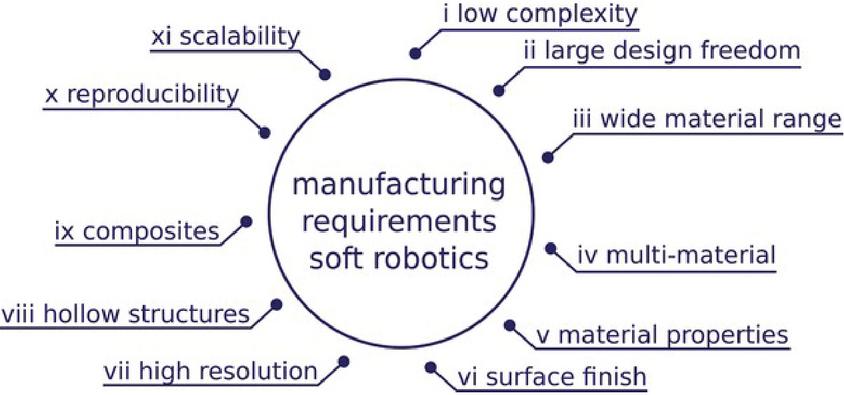
Figure 2 Manufacturing requirements of soft robots.
3 Manufacturing
Traditional manufacturing techniques such as milling, and drilling are not ideal for the production of soft robots due to their complex shapes. Due to the complexity of these structures, more advanced methods such as 3D printing and shape deposition are being developed [27, 28]. There are some manufacturing requirements for the proper design of soft robotics as shown in Figure 2. A type of rapid prototyping known as shape deposition manufacturing (SDM) involves the process of depositing a material and then producing a finished product. This process typically involves the material taking a shape of the desired structure and then producing a final part that includes the embedded parts. Researchers have been able to develop soft robots using embedded hardware, such as sensors, actuators, and circuits, which can be found in various polymeric materials robots [29–31]. One of the most common methods used to create these robots is the combination process known as laser machining. This process is used to create a structure that consists of both the flexible and rigid materials. The use of flexible polymers as the skeleton’s joints is carried out through flexible and rigid materials. In the manufacturing of mesoscale robots, the use of polymer connectors is often used.
Through the use of 3D printing techniques, such as direct ink writing, a wide range of silicone inks can be produced [32]. This process can be used to create several types of fluidic and flexible actuators. Through this process, a seamless production of these products can be carried out, which allows them to exhibit a variety of mechanical properties [33]. A broad area of functional soft robots is made utilizing this process, which can be used to create several types of bending, twisting, and contracting motions. This method avoids the drawbacks of traditional manufacturing methods. Another type of 3D printing process is known as shape morphogenesis, which is capable of producing materials that are water responsive, photosensitive, or thermal activated [31, 32]. Due to the properties of these materials, they can be used to create several types of shapes and features, such as turning and shaping. One of the most common examples of this process is the use of light reactive ink-jet printing on a target. In addition, shape memory polymers have been developed, which are composed of a skeleton and a hinge material [33]. The temperature at which the material is heated can affect the properties of the hinge material, but it does not affect the skeleton material. Through this process, the shape memory polymer can also be continuously improved.
4 Actuation Methods
The actuation system enables soft robots to move and interact with their environment. Due to their compliant nature, these types of robots are not required to use rigid materials. This means that soft systems can operate without the metal frame and bones found in rigid ones [34]. There are various control methods that can be used to achieve soft system performance [35, 36]. Figure 3 is representing the main actuation types.
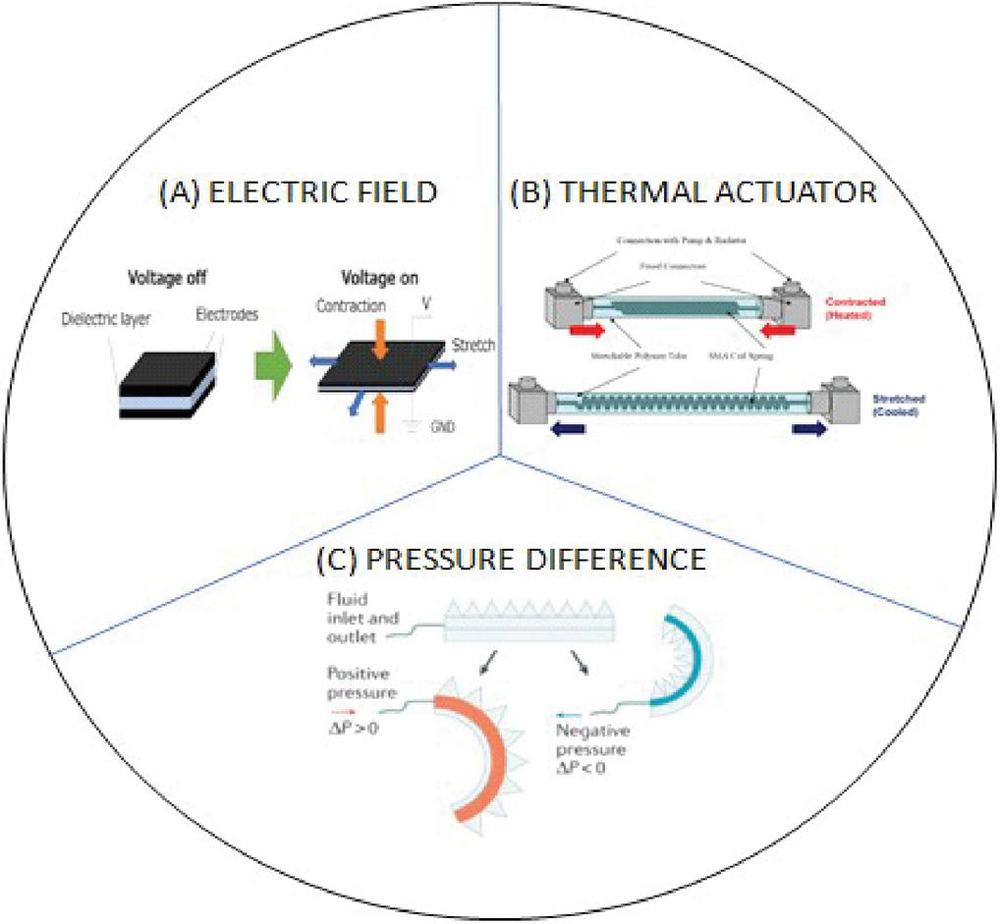
Figure 3 Types of actuations for soft robots.
4.1 Electric Field
Some soft robots include the use of electric field-based actuators and dielectric elastomeric actuators (DEAs). DEAs are commonly used to change the shape of a soft robot. These types of actuators can create excessive forces and have an excessive specific power, and they can also exhibit self-sensing capabilities. However, they require high voltages to operate properly [37–39]. This is a limiting factor in the potential applications of these types of actuators. Due to the nature of their components, these types of actuators are prone to experiencing leakage currents and electrical breakdowns. These issues can potentially lead to system failure. New research has shown that there are numerous ways that can be used to overcome these issues [40, 41]. For instance, by incorporating thin shell and liquid dielectric components, such as in the Peano-HASEL actuators, researchers were able to achieve the high performance.
4.2 Thermal
A type of reconfigurable material known as shape memory polymers (SMPs) can be used as an effective thermal conductor. These types of materials can remember their real shape when subjected to temperature changes, and they can revert to it once they reach a certain temperature. Cross linked polymers, for instance, can be strained at elevated temperatures and then chilled down [42, 43]. When the surrounding temperature gets higher, there will be no pressure, and the material’s shape will come to its real form. This principle tells that there is only one permanent movement in the material, though there have been examples of it being able to have up to five temporary shapes. One of the most common examples of this type of reconfigurable material is a toy known as the “Shrinky Dinks.” This is a pre-stretched polystyrene sheet that can be used to cut out various shapes that will decrease in shape when heated [44–46]. These materials can be used as an effective thermal conductor and can achieve strains of up to a hundred percent. Thermal actuators show low force generation and slow response. Some of these include polyurethane, polyethylene terephthalate, and polyethylene oxide [47, 48]. A control system for soft robotic manipulation is made using shape memory alloys. Unlike traditional materials, these springs are made from thin wires and are not as rigid as they would be if they were made of metal. Despite their high force-to-mass ratio, these springs can be stretched through the heat. However, this is not very energy efficient.
4.3 Pressure Difference
One of the most common control methods used in soft robots is pneumatic artificial muscles, which are designed to act as a muscle by applying force to its surroundings. The pneumatic pressure can create deformation of the soft actuator according to structure and fluid passage in the actuator [49]. This method can be applied through the application of valves, which can maintain a certain shape without requiring additional energy [50, 51]. This method usually requires compressed air, because high pressure liquid fluids are not suitable for such soft structures due to weight of the liquid fluid. The most common algorithm used for controlling pneumatic muscles is the proportional-integral-derivative based feedback control. This allows users to modify the dynamic response of the muscles by controlling their parameters [52, 53].
5 Sensing
The morphology and compliance of soft robots prevent the use of traditional sensors such as strain gages, encoders, and inertial measurement units. Although flexible-bending sensors made from piezoelectric materials can be used for various soft applications, but sometimes they are not appropriate for these systems due to their need for the high stretchability and bendability [54, 55]. New sensing technologies that can be benefitted from soft electronics and machine learning could lead to the development of new sensing modalities [56, 57]. For instance, the basis of a soft robot’s sense of movement is usually based on its non-contact sensors and liquid-phase materials. Since curvatures are actuated by the movement of the robot, the need for curvature sensors is also important [58, 59]. One of the most crucial factors that can be considered when it comes to developing new sensing technologies is the low-moisture level of the proposed materials. This allows them to achieve a minimal change in the internal structure’s performance. These flexible sensors are usually characterized by multiple thin layers of an elastomer that are patterned with micro channels [60]. Through the addition of liquid conductor, the channels can be filled with gallium-containing alloys. This allows them to be used for sensing various strains, such as shear, curvature, and tensile. Due to the complexity of the channel networks, it is often difficult to develop effective and efficient sensors. To address this issue, researchers have started investigating the possibility of 3D printing conductive soft materials [61–63]. In addition to being used for monitoring soft robots’ body segments, exteroceptive sensing could also be utilized to measure the curvatures of the objects in real time. This technology could be useful in developing new sensing systems for other soft robots. Compared to audio and optical recorders, these flexible sensors could be more compatible with soft robots.
6 Uses and Applications
6.1 Surgical Assistance
The invasive surgery could be performed using soft robots, which can be programmed to perform various tasks depending on their shape. Shape change is very important when it comes to develop soft robots, as they can move around the human body by adjusting their form [64]. Generally, fluidic actuation is suitable for surgical applications, that can provide deformation of a soft actuator according to the shape requirement and safer interaction with human [65].
6.2 Exosuits
In addition to being used for rehabilitation, soft robots can also be utilized for various other applications, such as assisting the elderly or enhancing a person’s strength [66, 67]. In [68], an exosuit has been developed for the hip assistance that is made from flexible materials, which provides users with additional strength without restricting their natural movement. Exosuits are metal and soft frameworks that are designed to increase the strength of a person using their muscles [69, 70]. These suits are also known as robotic suits. The metal framework of these suits mimics the skeletal structure of the wearer. They can make lifted objects feel lighter and improve compliance.
6.3 Collaborative Robots
Due to safety concerns, robots have typically been restricted from interacting with humans [71]. This is because a collision between a rigid robot and a human could lead to injury. However, soft robots can safely interact collaboratively with humans without causing any harm. Thus, they are being used in many industrial and medical applications to collaborate with human operate in a safer way [72].
6.4 Bio-mimicry
Bio mimicry can be used in space and ocean exploration. Scientists are currently looking for extra-terrestrial life in the water bodies that are home to life on Earth. By developing soft robots that can mimic the movement of sea creatures, researchers can gain a deeper understanding of these bodies of water. In 2015, a team from Cornell developed a soft robot that can mimic the movement of sea creatures. The goal of the project was to explore Jupiter’s moon Europa’s ocean floor [73]. In 2021, researchers were able to demonstrate the capabilities of a bio-inspired soft robot that can operate deep-sea. The robot was able to withstand the pressure at the Mariana Trench, which is located in the ocean’s deepest region [74, 75]. The flexible robot, which features artificial wings and muscles, can be used for environmental monitoring and deep-sea exploration. In 2021, researchers from Duke University developed a soft robot that can monitor the temperature and acidity levels of water. Dubbed as DraBot, the robot can also detect oil pollutants and other environmental factors [76].
6.5 Cloaking
Soft robots that look like animals could be used for various purposes, such as surveillance and ecological studies [77]. Currently, soft robots are not only rigid skeleton cloaked with soft skins, but they are entirely made up of soft composite materials [78]. They could also be used for developing artificial camouflage [79].
6.6 Artificial Muscle
Soft robots could be used for various purposes, such as surveillance and for medical devices. Artificial muscles, also referred to as muscle-like actuators, are devices that can be made to mimic the natural muscle movement by reacting to external factors such as temperature, pressure, voltage, and current. The three basic responses of an artificial muscle are rotation, contraction, and expansion. These responses can be combined to produce distinct types of movements, such as bending and twisting. However, conventional motors and rotary actuators are not considered artificial muscles due to the number of components involved and their rigidity [2, 80–83]. The advantages of artificial muscles, such as their high flexibility and power-to-weight ratio, are expected to have a significant impact on the development of modern soft technologies. Although they are currently in their preliminary stages of development, they could potentially be used in various fields such as medical rehabilitation devices.
6.7 Electronic Skin
A robotic finger that is made of a type of manufactured human skin, which is an electronic skin that can give off biological skin-like haptic feedback and allow a user to feel and react to a robotic hand movement [84]. This type of skin can also be used for sensing various hazardous substances and pathogens. Another type of robot skin is a multi-layered, flexible, and resilient plastic that can be used for wearable or robotic sensing. Electronic skin is a class of flexible, self-healing, and stretchable electronic devices that can mimic the functions of animals and humans [85]. These devices are capable of sensing environmental factors such as pressure and heat. In order to reproduce the human skin’s capabilities, soft materials are designed to be capable of adapting to changes in temperature and pressure. The goal of electronic skin research is to design materials that are flexible, robust, and stretchy [3, 86]. The development of new materials has progressed in the fields of tactile sensing and flexible electronics. However, the design of electronic skin has tried to bring together the various aspects of this research without sacrificing the individual benefits. The ability to self-heal and flexible mechanical properties of electronic skin could lead to the development of various new applications such as artificial intelligence and healthcare monitoring. In addition to being eco-friendly, the design process of electronic skin has also been heavily influenced by the principles of environmental awareness. One of the main challenges that the development of electronic skin has been faced is the ability to endure the mechanical strain and support its sensing properties. This is because the ability to self-heal and recyclability are typically the most critical factors that affect the design of new electronic skins [87].
7 Conclusion and Future Scope
This review paper presented an overview of soft robotics technologies with a focus on design, manufacturing, actuation, and sensing. Moreover, uses and applications of soft robots have been discussed in this review. The soft robot is made up of a variety of soft materials, such as silicon rubber which are flexible and highly elastic. Its flexible movement and high freedom allow it to perform various tasks and activities. Compared to traditional rigid robots, this type of robot can be designed and operated in a variety of environments. The advantages of soft robots have been widely used in various fields, such as military, medical, and industrial. However, their development has been hindered by the lack of cooperation between various fields, which is required for their successful implementation by combining the research in materials, chemical, mechanical, electronics, etc. The development of soft robots requires the cooperation of various multi-disciplinary teams including material science, engineering, and control. Besides being able to perform various tasks and activities, the development of these robots also requires the development of a robust and flexible sensing system.
The increasing popularity of soft robots has led to the development of new types of robots that can perform various complex tasks and activities in limited spaces. These new types of robots have been designed to be more interactive and capable of handling complex tasks with safer interaction with human. Due to their capabilities, they could potentially address the increasing demands in areas such as military, rehabilitation, and assistive technology. Artificial intelligence could be used in the development of soft robots that can autonomously navigate and manipulate systems that are commonly used in different fields, such as medical and industrial. These systems could be used to improve the efficiency of operations in disaster areas and provide humanitarian assistance. Inspired by living creatures, such as the skin and muscles of living organisms, soft robots are built to perform tasks that human and animals do. They can also be programmed to respond to environmental conditions and interact with humans. Compared to conventional robots, soft robots have many advantages, such as being able to compensate for the uncertainties in the environment by using their compliant structure. Moreover, soft robots are lighter in weight and adaptable to the changes in interacting objects. Many animals, such as insects and vertebrates, have rigid structural frameworks that are covered with soft muscles and skin. This combination of soft and conventional robots could be used to achieve the best possible solution. This paper presented a review of existing technologies in the field of soft robotics and it can be concluded that the soft robots are bringing revolution in medical field by providing soft wearable devices and surgery devices that are safe to interact with human. However, still a lot of advanced research is required in the fields of soft materials, manufacturing methods, actuators, and sensors in order to have efficient design of soft robots. For future work, it is interesting to do comparative study for different soft robotics technologies.
References
[1] Della Santina, C., Catalano, M. G., Bicchi, A., Ang, M., Khatib, O., and Siciliano, B. (2020). Soft robots. Encyclopedia of Robotics, 489.
[2] Rus, D., and Tolley, M. T. (2015). Design, fabrication and control of soft robots. Nature, 521(7553), 467–475.
[3] Shintake, J. (2022). Green Robotics: Toward Realization of Environmentally Friendly Soft Robots. Journal of Robotics and Mechatronics, 34(2), 270–272.
[4] Schmitt, F., Piccin, O., Barbé, L., and Bayle, B. (2018). Soft robots manufacturing: A review. Frontiers in Robotics and AI, 5, 84.
[5] Chen, Feifei, and Michael Yu Wang. “Design optimization of soft robots: A review of the state of the art.” IEEE Robotics & Automation Magazine 27.4 (2020): 27–43.
[6] Lee, Y., W. J. Song, and J-Y. Sun. “Hydrogel soft robotics.” Materials Today Physics 15 (2020): 100258.
[7] Iida, Fumiya, and Cecilia Laschi. “Soft robotics: Challenges and perspectives.” Procedia Computer Science 7 (2011): 99-102.
[8] Walker, James, et al. “Soft robotics: A review of recent developments of pneumatic soft actuators.” Actuators. Vol. 9. No. 1. MDPI, 2020.
[9] Garrad, Martin, et al. “A soft matter computer for soft robots.” Science Robotics 4.33 (2019): eaaw6060.
[10] Xiao, Yao-Yu, Zhi-Chao Jiang, and Yue Zhao. “Liquid Crystal Polymer-Based Soft Robots.” Advanced Intelligent Systems 2.12 (2020): 2000148.
[11] Youssef, Samuel M., et al. “Underwater soft robotics: A review of bioinspiration in design, actuation, modeling, and control.” Micromachines 13.1 (2022): 110.
[12] Paik, J. (2018). Soft robot design methodology for ‘push-button ‘manufacturing. Nature Reviews Materials, 3(6), 81–83.
[13] Laschi, C., Mazzolai, B., and Cianchetti, M. (2016). Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Science robotics, 1(1), eaah3690.
[14] Nemiroski, A., Shevchenko, Y. Y., Stokes, A. A., Unal, B., Ainla, A., Albert, S., … and Whitesides, G. M. (2017). Arthrobots. Soft robotics, 4(3), 183–190.
[15] Khanbareh, H., de Boom, K., Schelen, B., Scharff, R. B. N., Wang, C. C. L., van der Zwaag, S., and Groen, P. (2017). Large area and flexible micro-porous piezoelectric materials for soft robotic skin. Sensors and Actuators A: Physical, 263, 554–562.
[16] Crowley, G. B., Zeng, X., and Su, H. J. (2022). A 3D printed soft robotic gripper with a variable stiffness enabled by a novel positive pressure layer jamming technology. IEEE Robotics and Automation Letters, 7(2), 5477–5482.
[17] Li, S., Stampfli, J. J., Xu, H. J., Malkin, E., Diaz, E. V., Rus, D., and Wood, R. J. (2019, May). A vacuum-driven origami “magic-ball” soft gripper. In 2019 International Conference on Robotics and Automation (ICRA) (pp. 7401–7408). IEEE.
[18] Truby, R. L., Wehner, M., Grosskopf, A. K., Vogt, D. M., Uzel, S. G., Wood, R. J., and Lewis, J. A. (2018). Soft somatosensitive actuators via embedded 3D printing. Advanced Materials, 30(15), 1706383.
[19] Tse, Z. T. H., Chen, Y., Hovet, S., Ren, H., Cleary, K., Xu, S., …and Monfaredi, R. (2018). Soft robotics in medical applications. Journal of Medical Robotics Research, 3(03n04), 1841006.
[20] Fras, J., Noh, Y., Macias, M., Wurdemann, H., and Althoefer, K. (2018, May). Bio-inspired octopus robot based on novel soft fluidic actuator. In 2018 IEEE International Conference on Robotics and Automation (ICRA) (pp. 1583–1588). IEEE.
[21] Shen, H., and Magazine, N. (2016). Beyond terminator: squishy” octobot” heralds new era of soft robotics. Nature.
[22] Miron, G., and Plante, J. S. (2016). Design principles for improved fatigue life of high-strain pneumatic artificial muscles. Soft Robotics, 3(4), 177–185.
[23] Y. Sugiyama and S. Hirai, “Crawling and jumping by a deformable robot,” Int. J. of Robotics Research, Vol. 25, No. 56, pp. 603–620, 2006.
[24] Z. Zhang, X. Wang, S. Wang, D. Meng, and B. Liang, “Design and Modeling of a Parallel-Pipe-Crawling Pneumatic Soft Robot,” IEEE Access, Vol. 7, pp. 134301–134317, 2019.
[25] Martinez, R. V., Glavan, A. C., Keplinger, C., Oyetibo, A. I., and Whitesides, G. M. (2014). Soft actuators and robots that are resistant to mechanical damage. Advanced Functional Materials, 24(20), 3003–3010.
[26] Zhang, Y., Li, P., Quan, J., Li, L., Zhang, G., and Zhou, D. (2023). Progress, challenges, and prospects of soft robotics for space applications. Advanced Intelligent Systems, 5(3), 2200071.
[27] Schmitt, F., Piccin, O., Barbé, L., and Bayle, B. (2018). Soft robots manufacturing: A review. Frontiers in Robotics and AI, 5, 84.
[28] Hann, Sung Yun, et al. “4D printing soft robotics for biomedical applications.” Additive Manufacturing 36 (2020): 101567.
[29] Joyee, E. B., and Pan, Y. (2019). Multi-material additive manufacturing of functional soft robot. Procedia Manufacturing, 34, 566–573.
[30] Wallin, T. J., Pikul, J., and Shepherd, R. F. (2018). 3D printing of soft robotic systems. Nature Reviews Materials, 3(6), 84–100.
[31] Gul, J. Z., Sajid, M., Rehman, M. M., Siddiqui, G. U., Shah, I., Kim, K. H., and Choi, K. H. (2018). 3D printing for soft robotics–a review. Science and technology of advanced materials, 19(1), 243–262.
[32] Gariya, N., and Kumar, P. (2021). A review on soft materials utilized for the manufacturing of soft robots. Materials Today: Proceedings, 46, 11177–11181.
[33] Truby, R. L., and Lewis, J. A. (2016). Printing soft matter in three dimensions. Nature, 540(7633), 371–378.
[34] Wang, Jiangxin, Dace Gao, and Pooi See Lee. “Recent progress in artificial muscles for interactive soft robotics.” Advanced Materials 33.19 (2021): 2003088.
[35] Pal, Aniket, et al. “Exploiting mechanical instabilities in soft robotics: Control, sensing, and actuation.” Advanced Materials 33.19 (2021): 2006939.
[36] T. Wang, Y. Hao, X. Yang, and L. Wen, “Soft Robotics: Structure, Actuation, Sensing and Control,” J. of Mechanical Engineering, Vol. 53, No. 13, pp. 1–13, 2017.
[37] El-Atab, Nazek, et al. “Soft actuators for soft robotic applications: A review.” Advanced Intelligent Systems 2.10 (2020): 2000128.
[38] Xiao, Youhua, et al. “Anisotropic electroactive elastomer for highly maneuverable soft robotics.” Nanoscale 12.14 (2020): 7514–7521.
[39] Hines, L., Petersen, K., Lum, G. Z., and Sitti, M. (2017). Soft actuators for small-scale robotics. Advanced materials, 29(13), 1603483.
[40] Hajiesmaili, E., and Clarke, D. R. (2019). Reconfigurable shape-morphing dielectric elastomers using spatially varying electric fields. Nature communications, 10(1), 1–7.
[41] Khan, A. H., Shao, Z., Li, S., Wang, Q., and Guan, N. (2020). Which is the best PID variant for pneumatic soft robots an experimental study. IEEE/CAA journal of automaticasinica, 7(2), 451.
[42] Yang, S., and Lu, N. (2013). Gauge factor and stretchability of silicon-on-polymer strain gauges. Sensors, 13(7), 8577–8594.
[43] Wu, Shuang, et al. “Fast thermal actuators for soft robotics.” Soft Robotics 9.6 (2022): 1031–1039.
[44] Farhan, Muhammad, et al. “Origami hand for soft robotics driven by thermally controlled polymeric fiber actuators.” MRS Communications 11 (2021): 476–482.
[45] Huang, Xiaonan, et al. “Highly dynamic shape memory alloy actuator for fast moving soft robots.” Advanced Materials Technologies 4.4 (2019): 1800540.
[46] Xia, Y., He, Y., Zhang, F., Liu, Y., and Leng, J. (2021). A review of shape memory polymers and composites: mechanisms, materials, and applications. Advanced materials, 33(6), 2000713.
[47] Cianchetti, M. (2013). Fundamentals on the use of shape memory alloys in soft robotics. Interdisciplinary mechatronics, 227–254.
[48] Zhang, X., Tan, B. H., and Li, Z. (2018). Biodegradable polyester shape memory polymers: Recent advances in design, material properties and applications. Materials Science and Engineering: C, 92, 1061–1074.
[49] Gariya, N., and Kumar, P. (2022). A comparison of plane, slow pneunet, and fast pneunet designs of soft pneumatic actuators based on bending behavior. Materials Today: Proceedings, 65, 3799–3805.
[50] T. Wang, Y. Hao, X. Yang, and L. Wen, “Soft Robotics: Structure, Actuation, Sensing and Control,” J. of Mechanical Engineering, Vol. 53, No. 13, pp. 1–13, 2017.
[51] Zaidi, Shadab, et al. “Actuation technologies for soft robot grippers and manipulators: A review.” Current Robotics Reports 2.3 (2021): 355–369.
[52] Xavier, Matheus S., Andrew J. Fleming, and Yuen K. Yong. “Design and control of pneumatic systems for soft robotics: A simulation approach.” IEEE Robotics and Automation Letters 6.3 (2021): 5800–5807.
[53] Diteesawat, Richard Suphapol, et al. “Electro-pneumatic pumps for soft robotics.” Science robotics 6.51 (2021): eabc3721.
[54] Pal, Aniket, et al. “Exploiting mechanical instabilities in soft robotics: Control, sensing, and actuation.” Advanced Materials 33.19 (2021): 2006939.
[55] Pang, Yaokun, et al. “Skin-inspired textile-based tactile sensors enable multifunctional sensing of wearables and soft robots.” Nano Energy 96 (2022): 107137.
[56] Shih, Benjamin, et al. “Electronic skins and machine learning for intelligent soft robots.” Science Robotics 5.41 (2020): eaaz9239.
[57] Chin, Keene, Tess Hellebrekers, and Carmel Majidi. “Machine learning for soft robotic sensing and control.” Advanced Intelligent Systems 2.6 (2020): 1900171.
[58] Sachyani Keneth, E., Kamyshny, A., Totaro, M., Beccai, L., and Magdassi, S. (2021). 3D printing materials for soft robotics. Advanced Materials, 33(19), 2003387.
[59] Koh, S. J. A., Zhao, X., and Suo, Z. (2009). Maximal energy that can be converted by a dielectric elastomer generator. Applied Physics Letters, 94(26), 262902.
[60] Ren, L., Li, B., Wei, G., Wang, K., Song, Z., Wei, Y., … and Liu, Q. (2021). Biology and bioinspiration of soft robotics: Actuation, sensing, and system integration. Iscience, 24(9), 103075.
[61] Vogt, D. M., Park, Y. L., and Wood, R. J. (2013). Design and characterization of a soft multi-axis force sensor using embedded micro fluidic channels. IEEE sensors Journal, 13(10), 4056–4064.
[62] Majidi, C., Kramer, R., and Wood, R. J. (2011). A non-differential elastomer curvature sensor for softer-than-skin electronics. Smart materials and structures, 20(10), 105017.
[63] Navarro, Stefan Escaida, et al. “A model-based sensor fusion approach for force and shape estimation in soft robotics.” IEEE Robotics and Automation Letters 5.4 (2020): 5621–5628.
[64] Cianchetti, M., Ranzani, T., Gerboni, G., Nanayakkara, T., Althoefer, K., Dasgupta, P., and Menciassi, A. (2014). Soft robotics technologies to address shortcomings in today’s minimally invasive surgery: the STIFF-FLOP approach. Soft robotics, 1(2), 122–131.
[65] Runciman, Mark, Ara Darzi, and George P. Mylonas. “Soft robotics in minimally invasive surgery.” Soft robotics 6.4 (2019): 423–443.
[66] Martinez, Ramses V. “Wearables, E-textiles, and Soft Robotics for Personalized Medicine.” Springer Handbook of Automation. Cham: Springer International Publishing, 2023. 1265–1287.
[67] Garcia, Lourdes, et al. “The role of soft robotic micromachines in the future of medical devices and personalized medicine.” Micromachines 13.1 (2021): 28.
[68] Ding, Y., Kim, M., Kuindersma, S., and Walsh, C. J. (2018). Human-in-the-loop optimization of hip assistance with a soft exosuit during walking. Science robotics, 3(15), eaar5438.
[69] Bardi, Elena, et al. “Upper limb soft robotic wearable devices: a systematic review.” Journal of NeuroEngineering and Rehabilitation 19.1 (2022): 1–17.
[70] Awad, Louis N., et al. “Walking faster and farther with a soft robotic exosuit: Implications for post-stroke gait assistance and rehabilitation.” IEEE open journal of engineering in medicine and biology 1 (2020): 108–115.
[71] Kragic, D., Gustafson, J., Karaoguz, H., Jensfelt, P., and Krug, R. (2018, July). Interactive, Collaborative Robots: Challenges and Opportunities. In IJCAI (pp. 18–25).
[72] Firth, Charlotte, et al. “Anthropomorphic soft robotic end-effector for use with collaborative robots in the construction industry.” Automation in Construction 138 (2022): 104218.
[73] Mousa, M. A., Soliman, M., Saleh, M. A., and Radwan, A. G. (2020). Biohybrid soft robots, e-skin, and bioimpedance potential to build up their applications: a review. IEEE Access, 8, 184524–184539.
[74] Galiana, H. L., Saunders, B. E., Lee, G., Lytton, W. W., Santello, M., and Rothrauff, B. B. (2018). Advances in Biomimetic Robotics. Advances in Biomimetic Robotics, 325.
[75] Bira, Nicholas, Yiği Mengüç, and Joseph R. Davidson. “3D-printed electroactive hydraulic valves for use in soft robotic applications.” 2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020.
[76] Kumar, V., Ko, U. H., Zhou, Y., Hoque, J., Arya, G., and Varghese, S. (2021). Microengineered Materials with Self-Healing Features for Soft Robotics. Advanced Intelligent Systems, 3(7), 2100005.
[77] Kim, H., Choi, J., Kim, K. K., Won, P., Hong, S., and Ko, S. H. (2021). Biomimetic chameleon soft robot with artificial crypsis and disruptive coloration skin. Nature communications, 12(1), 1–11.
[78] Lipson, Hod. “Challenges and opportunities for design, simulation, and fabrication of soft robots.” Soft Robotics 1, no. 1 (2014): 21–27.
[79] Li, P., Wang, Y., Gupta, U., Liu, J., Zhang, L., Du, D., …and Zhu, J. (2019). Transparent soft robots for effective camouflage. Advanced Functional Materials, 29(37), 1901908.
[80] Mirvakili, S. M., and Hunter, I. W. (2018). Artificial muscles: Mechanisms, applications, and challenges. Advanced Materials, 30(6), 1704407.
[81] Wang, Jiangxin, Dace Gao, and Pooi See Lee. “Recent progress in artificial muscles for interactive soft robotics.” Advanced Materials 33.19 (2021): 2003088.
[82] Minaian, Nazanin, Zakai J. Olsen, and Kwang J. Kim. “Ionic Polymer-Metal Composite (IPMC) artificial muscles in underwater environments: review of actuation, sensing, controls, and applications to soft robotics.” Bioinspired Sensing, Actuation, and Control in Underwater Soft Robotic Systems (2021): 117–139.
[83] Zhu, Mengjia, et al. “Fluidic fabric muscle sheets for wearable and soft robotics.” Soft robotics 7.2 (2020): 179–197.
[84] Liu, F., Deswal, S., Christou, A., ShojaeiBaghini, M., Chirila, R., Shakthivel, D. and Dahiya, R. (2022). Printed synaptic transistor–based electronic skin for robots to feel and learn. Science Robotics, 7(67), eabl7286.
[85] Kang, J., Tok, J. B. H., and Bao, Z. (2019). Self-healing soft electronics. Nature Electronics, 2(4), 144–150.
[86] Ying, Binbin, and Xinyu Liu. “Skin-like hydrogel devices for wearable sensing, soft robotics and beyond.” Iscience 24.11 (2021).
[87] Zou, Z., Zhu, C., Li, Y., Lei, X., Zhang, W., and Xiao, J. (2018). Rehealable, fully recyclable, and malleable electronic skin enabled by dynamic covalent thermoset nanocomposite. Science advances, 4(2), eaaq0508.
Biographies

Jyoti Joshi pursuing Ph.D. degree in Soft Robotics from Graphic Era (Deemed to be University), Dehradun, India. She received the Master of Technology degree in CAD/CAM and robotics from Graphic Era (Deemed to be University), Dehradun, India and Bachelor of Technology degree in Mechanical Engineering from Graphic Era Hill University, Bhimtal, India. Currently, she is working as an Assistant Professor in the Department of Mechanical Engineering, Graphic Era (Deemed to be University), Dehradun, India. Her research interests include, CAD, control and robotics.

Avi Raj Manral received the Masters of Business Administration degree in Finance from Graphic Era (Deemed to be University), Dehradun, India. He received the Bachelor of Technology degree in Mechanical Engineering from Graphic Era (Deemed to be University), Dehradun, India. Currently, he is working as a Permit Coordinator in Comcast SEU. His research interests include FEA, CAD, and robotics.

Pushpendra Kumar received the Ph.D. degree in automatic control from University of Lille, France. He received the Master of Technology degree in CAD/CAM and robotics from Indian Institute of Technology Roorkee; and Bachelor of Technology degree in mechanical engineering from Uttar Pradesh technical university, India. He has got two years of Postdoctoral research experience from University of Lille, France. Currently, he is working as an Associate Professor in the Department of Mechanical Engineering, Graphic Era (Deemed to be University), Dehradun, India. His research interests include dynamics, control and robotics.
Journal of Graphic Era University, Vol. 11_2, 239–260.
doi: 10.13052/jgeu0975-1416.1128
© 2023 River Publishers