Discrete and Continuum Modeling of Coulomb Friction Damping in Stone Blocks
Vinay Purohit* and Pavan Kumar Emani
Graphic Era Deemed to be University, Dehradun, Uttarakhand-248002, India
E-mail: vinaypurohit8126@gmail.com
*Corresponding Author
Received 12 March 2022; Accepted 16 July 2022; Publication 12 September 2022
Abstract
Friction plays an important role in creating damping mechanism in structures. In this paper a study was conducted to analyze coulomb friction damping and frictional energy dissipation mechanism with stone blocks in a single degree of freedom system by discrete and continuum modeling in finite element-based software ABAQUS. Discrete and continuum modeling approach was used in this study. It was found that both approaches gave similar results.
Keywords: Coulomb, friction, damping, energy dissipation, ABAQUS.
1 Introduction
Some work has already been done in the past regarding behavior of friction and to analyze the behavior of simple system with coulomb friction. Den Hartog (1931) was the first to obtain analytical expression in closed-form for single degree of system, which was excited by harmonic force. Experimentally and theoretically, it was shown by him that during each cycle mass can continuously move or come to stop. Levitan (1960) further studied the forced oscillations of mass spring damper system by exciting support rather than mass. Hundal (1979) gave a closed form analytical expression for single degree of freedom system by coulomb friction force which was acting between the mass and the ground. But work was limited to two stops per cycle. Pratt and William (1981) described the relative motion of two masses with coulomb friction contact. Combined analytical-numerical approach was used by them. They emphasized that for certain ratio of excitation frequency and natural frequency, multiple lock ups are possible per cycle.
Ugo Andreaus (1990) in his work considered a two degree of freedom system which allowed the rigid-block-simulations to include uplifting and sliding on frictional foundations. A numerical procedure was given to solve the nonlinear equations of motion of base block system which was further used to analyze the dynamic response of the system under seismic excitation. Brain Feeny et al. (1998), gave a historical overview of structural and mechanical system with friction. Some examples of oscillators and dissipation laws in mechanism were traced. U.Galvanetto (2001) analyzed the role of friction and described in his paper discontinuous bifurcations found in mechanical system affected by dry friction. Kohju et al. (2012) proposed a seismic control device, tuned viscous mass damper (TVMD) for a building. Closed form solution of a seismic control design for a single degree of free on system under harmonic excitation was obtained. Vibration control system using TVMD (Tuned Viscous Mass Damper) was found to be most effective for linear structural system with dampers. The effectiveness of TVMD (Tuned Viscous Mass Damper) is further verified by numerical analyses and shake-table testing. Kamai et al. (2008) provided an approach to estimate historic ground motions by back analysis of unique structural failures in archaeological sites. Up to the point of incipient failure, structural response is studied and response of structure was found to be very sensitive to the dynamic parameters. Lin and Tadjbakhsh (1986) studied the effect of ground motion in vertical direction on horizontal response of a structure which is partially or fully decoupled from foundation by friction. The present study effort was made to analyze the role of coulomb friction damping in single degree of freedom system with the help of finite element-based software ABAQUS under the dynamic loading.
Pepe et al. (2020) primarily focused on the analysis of settlement induced failure patterns characterizing the in-plane response of two-dimensional dry joint masonry. Different approaches and numerical models have been adopted like discrete model, limit analysis and a continuous FEM model in the study. Some selected case studies and numerical results have been interpreted to prove the efficacy of approaches to predict failure pattern. Dell’Endice et al. (2021) investigated the influence of geometrical and mechanical imperfections by comparing DEM (Discrete Element Modeling) analysis with the result obtained from tests on a scale modal. Good results were obtained from DEM analysis and 3D printed scale model tests. Modeling of silent boundaries for discrete systems has been reported by Patchamatla and Emani (2020) using ABAQUS user-defined subroutines. Similar ABAQUS subroutines were developed by Patchamatla and Emani (2022) for two-dimensional continuum domains.
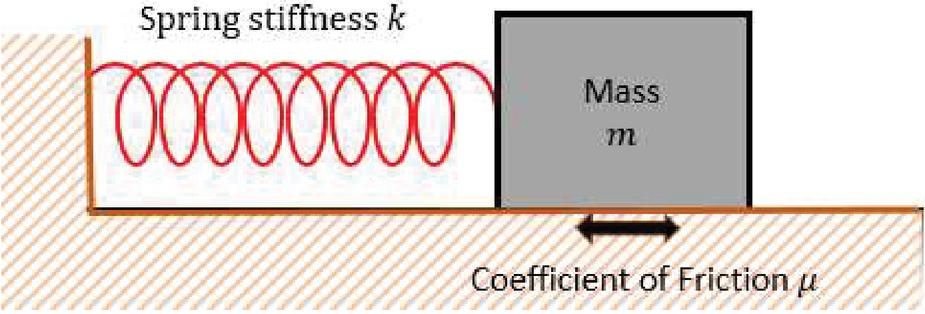
Figure 1 Mass spring system with mass sliding against dry surface.
2 Coulomb Friction Damping
Damping in any structure is due to several Mechanisms. Coulomb friction damping is because of sliding of two surface against each other. The friction force is F N. where is coefficient of friction which includes dynamic and static friction. Free vibration is a major cause for the motion. As motion starts the friction force becomes independent of velocity and acts always opposite to the direction of motion. The sign of friction force will change when the direction of motion changes. When motion starts the object will move back and forth in either left to right direction or right to left direction. Two equations of motion will be formed. The equation of motion of free vibration when object moves from left to right
| (1) |
When object moves from right to left
| (2) |
In discrete modeling mass spring system was created by using slide-plane connection type in ABAQUS. Slide plane connections helps to constrain the position of node to remain on a plane defined by the local normal direction. Coulomb friction in slide plane connection relates the friction forces to the kinematic constraint forces. The frictional effect is written as
| (3) |
In the above expression p(f) represents the magnitude of tangential frictional traction and is the normal force which produces friction and is the coefficient of static and dynamic friction. In slide plane, frictional stick occurs if and sliding will occur if .
, normal force which is the sum of connector force, and internal contact force .
| (4) |
The magnitude of tangential frictional traction p(f) is computed
| (5) |
In continuum modeling two stone blocks were used. To study the contact behavior of two stone blocks Coulomb friction was introduced. Coulomb friction comes whenever two surfaces come in contact with one another.
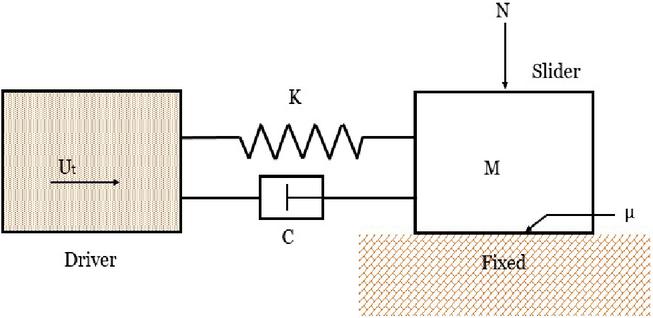
Figure 2 Stick slip motion of system.
3 Stick and Slip Phenomena
When two surfaces come in the contact, they slide relative to each other. Friction force applies between two surfaces. When body is at rest relative to the sliding body, static friction works between two surfaces. As the motion begins the static friction changes into the kinematic friction and the value of static friction decreases and the objects starts sliding over the surface. The value of static friction decreases and reaches to the kinematic friction and became constant. When object is sliding over another body the stick and slip phenomena occurs. Where the value of friction force is large, the body will stick to the slip surface and where the value of friction force decreases the slip phenomena will occur. The stick and slip phenomena will occur continuously in the system. The value of coefficient of static friction decreases and reaches to coefficient of kinematic friction by following a path of exponential curve. The graph and equation as mentioned in Figure 3.
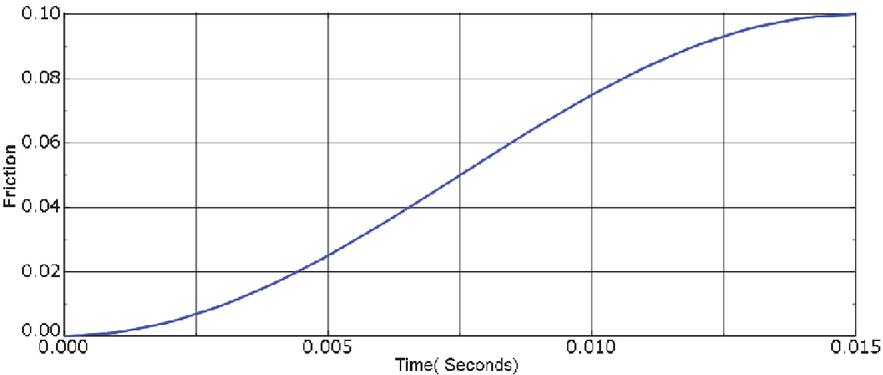
Figure 3 Variation of mobilized friction coefficient with time – static friction to dynamic friction.
4 Methodology
In the present study finite element-based software ABAQUS is used to study the behavior of a single degree of freedom system in which a block was attached to a spring by using discrete and continuum modeling. The damping behavior was analyzed on the basis of coulomb damped free vibration. In discrete modeling three reference points were created RF1 (Reference Point), RF2, and RF3 which are shown in Figure 4(a). RF1 and RF2 were added by spring member, RF1 and RF3 were added by slide plane connector. The amplitude was defined. The 40kg of mass was added to the RF1 and stiffness 1 10 N/m was given to the spring. The boundary conditions were applied to all three-reference point. The RF3 was made fixed so that it can move forward by restricting the motion in all the direction. The RF2 and RF3 was made fixed with boundary conditions and only the free movement was made in horizontal direction for RF1 and RF2. The ground displacement was given 1 m. In the interaction property the value of coefficient of friction is taken as 0.30, in ABAQUS and displacement is taken as 1m so the normal force acting in the side plane is
| (6) |
The internal contact friction value can not be provided in the case of slide plane connector so it is taken as zero.
| (7) |
The exponential decay curve from static to kinematic friction was given to system which is shown in Figure 3. In the continuum modeling two rigid stone blocks were created by using 3D solid modeling in ABAQUS. One stone block is created as a shape of cube and other one rectangular block with greater length along with less thickness. The cube shape block is placed on the rectangular surface to create contact between different surfaces. The density is given 40 kg/m. The material property was given same for both stone blocks. The interaction property was introduced between two surfaces with friction coefficient value of 0.30. The bottom surface of the cube is taken as Master surface and the top surface of the rectangular surface is taken as slave surface. Two steps were created. One step is static general and other one is dynamic implicit. Two reference points were created. RF1 were created at the center of cube stone block. The whole mass of cube’s block attached with RF1. RF2 was created on the other end, RF1 and RF2 were added with spring. Finally separate meshing was generated for different blocks so that interaction property works well in ABAQUS.
5 ABAQUS Modeling
5.1 Discrete Modeling
The value of internal contact friction is taken high as 18000N, so that friction come into play a significant role. The boundary conditions at the ground were U1 1m, U2 0, U3 0 and all other boundaries are restricted. The similar boundary conditions were given at RF2. The motion was completely restricted at the Boundary condition 3 defined at RF3 which represents the restriction of out of plane motion. Step 1 Dynamic, implicit was created.
Assembly: In assembly three reference points was created. RF1 and RF2 were joined by a spring. RF1 and RF3 were added with the slide plane connector. The assembly diagram is given Figure 4.
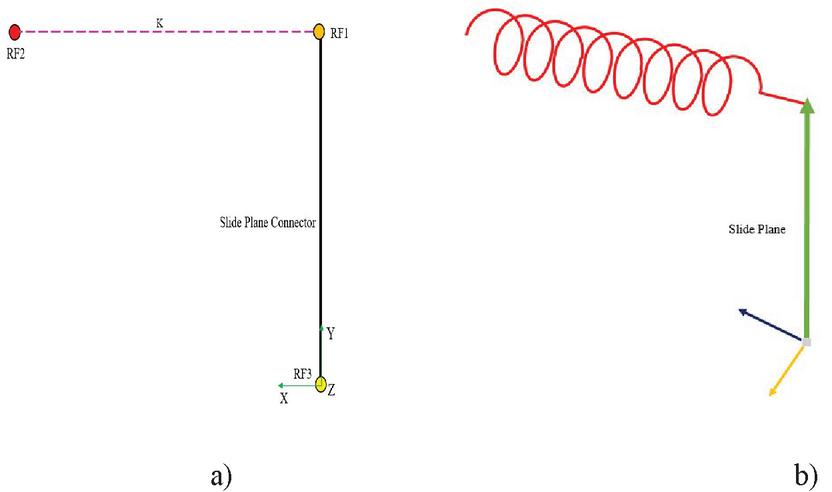
Figure 4 (a) Assembly diagram of mass spring system by discrete modeling (b) mass spring system after analysis in ABAQUS.
5.2 Continuum Modeling
In Continuum modeling a mass spring system was created in ABAQUS. Two rigid stone blocks were created by giving constrains in ABAQUS. Same material property was given to both the bodies. Interaction property was given by introducing penalty in ABAQUS. The remaining properties like mass, stiffness and density were kept same as the 2D model.
Continuum Assembly: Assembly was created by placing part1 above the Part2. Cube stone block was placed at the center of rectangular stone blocks. Spring was connected between RF1 and RF2. The assembly diagram is given below:
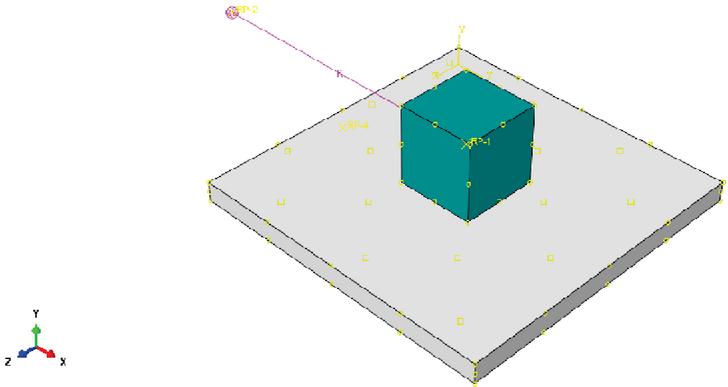
Figure 5 Assembly diagram of mass spring system by continuum modeling.
6 Results
Friction plays an important role in the dissipation of the energy. Following conclusions were derived from the analysis.
6.1 Discrete Modeling
The single degree of freedom system was analyzed by using discrete modeling (Figure 6). The free vibration response to initial displacement is shown in Figure 7 as a plot of displacement versus time. From graph it can be seen that in the beginning when the initial displacement given to the Node 2, it starts oscillating back and forth at its position. The time duration of graph is 2 sec. The RF1 starts vibrating at 1 sec rapidly and diminish completely at 2 sec. As friction is present between RF2 and Slide plane, it is creating a damping mechanism by which the energy in the system is dissipating with respect of time. As the time increases the graph of displacement with respect to time decreases and come to rest at 2.0 sec.
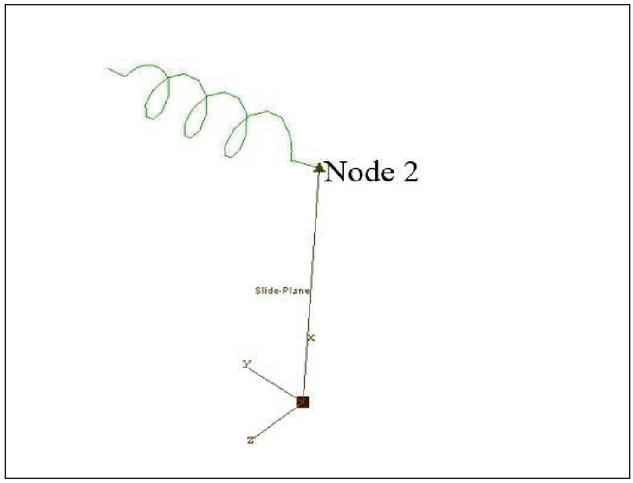
Figure 6 Discrete model of Single block on rough ground.
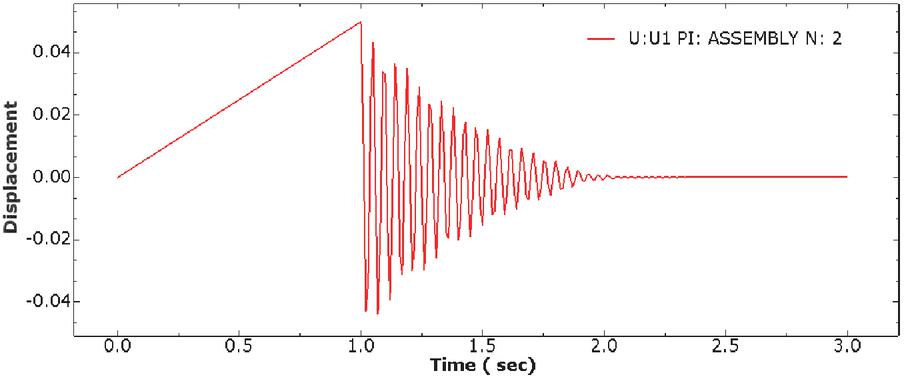
Figure 7 Displacement response of mass spring system by discrete modeling.
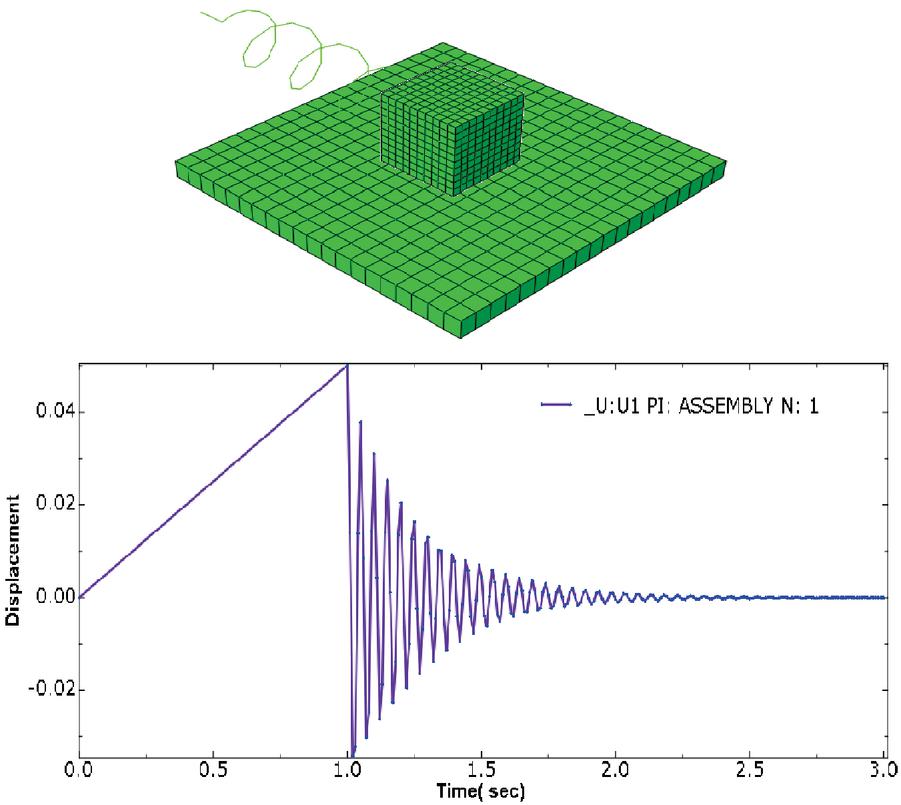
Figure 8 Continuum model and its displacement response.
6.2 Continuum Modeling
The single degree of freedom system’s analysis by using continuum modeling gave the same results as the discrete element modeling, although in 3D, the number of nodes increased multiple times in single stone blocks but it followed the same behavior like a single node in the discrete element modeling. Same parameters were applied in the continuum modeling for creating a rigid stone block. In continuum modeling, rigid block’s surface area has increased. As the contact area increased the magnitude of friction force will also increase because of which slight changes in graphs were obtained in ABAQUS analysis.
6.3 Similarities between Results by Both the Approaches
Figure 9 shows the comparison between the displacement time graph obtained from discrete element approach and continuum modeling approach. It was found out that displacement values of discrete element approach exceed the values obtained from the continuum modeling approach.
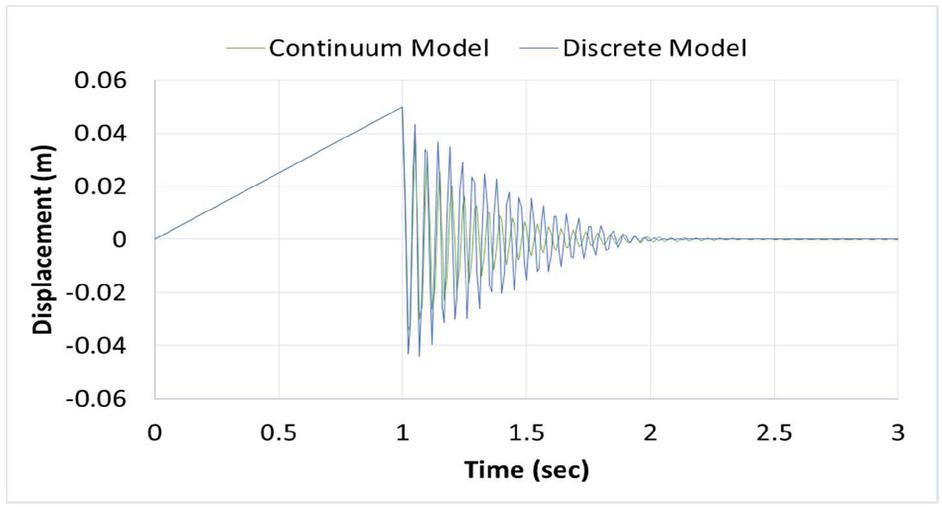
Figure 9 Displacement graph of mass spring system by continuum modeling.
7 Conclusion
Discrete and Continuum modeling approach were found to be successful in studying the behavior of a single degree of freedom system. Both approaches depict the same behavior under the coulomb friction damping. So, when modeling complex forms, the continuum models can be used with confidence. In discrete modeling computational effort was reduced and problem became simplified for analyzing the behavior in single degree of freedom system with the help of a single node or reference point. In continuum modeling rigid bodies made up of multiple nodes showed the same damped behavior as shown by a single node in discrete element modeling. Displacement values obtained by discrete modeling are slightly more than the values obtained by continuum modeling.
References
Andreaus Ugo (1990). Sliding-uplifting response of rigid blocks to base excitation. Earthquake Engineering and Structural Dynamics, Vol. 19, 1181–1196. https://onlinelibrary.wiley.com/doi/abs/10.1002/eqe.4290190808
Dell’Endice, A., Iannuzzo, A., DeJong, M. J., Van Mele, T., and Block, P. (2021). Modeling imperfections in unreinforced masonry structures: discrete element simulations and scale model experiments of a pavilion vault. Engineering Structures, 228, 111499. https://www.sciencedirect.com/science/article/pii/S0141029620341006
Den Hartog, J. P. (1931). Forced vibrations with combined coulomb and viscous damping. Trans. ASME, 53, 107–115. https://cir.nii.ac.jp/crid/1571980075517264640.
Fenny Brain, Guram Ardeshir, Hinrichs Nikolaus and Popp Karl (1998). A historical review on dry friction and stick slip phenomena. American Society of Mechanical Engineers. https://asmedigitalcollection.asme.org/appliedmechanicsreviews/articlea/51/5/321/401371/A-Historical-Review-on-Dry-Friction-and-Stick-Slip
Galvanetto U (2001) Some Discontinuous Bifurcations in a Two-Block Stick Slip System. Journal of Sound and Vibration: 248(4), 653–669. https://www.sciencedirect.com/science/article/abs/pii/S0022460X0193809X
Hundal M. S. (1979). Response of a Base Excited System with Coulomb and Viscous friction. Journal of Sound and Vibration, 64(3), 371–378. https://www.sciencedirect.com/science/article/abs/pii/0022460X79905832
Ikago Kohju, Saito Kenji, Inoue Norio (2012). Seismic control of single degree of freedom structure using tuned viscous mass damper Earthquake Engineering and Structural Dynamics 41: 453–474. https://onlinelibrary.wiley.com/doi/abs/10.1002/eqe.1138
Kamai Ronnie, Hatzor H. Yossef (2008). Numerical Analysis of Block Stone Displacement in Ancient Masonry Structures: A New Method to Estimate Historic Ground Motion. International Journal for Numerical and Analytical methods in geomechanics 32: 1321–1340. https://onlinelibrary.wiley.com/doi/abs/10.1002/nag.671
Levitan, E. S. (1960). Forced Oscillation of a Spring-Mass System Having Combined Coulomb and Viscous Damping. The Journal of the Acoustical Society of America, 32(10), 1265-1269. https://asa.scitation.org/doi/abs/10.1121/1.1907893
Lin, B. C., and Tadjbakhsh, I. (1986). Effect of vertical motion on friction-driven isolation systems. Earthquake engineering & structural dynamics, 14(4), 609–622. https://onlinelibrary.wiley.com/doi/abs/10.1002/eqe.4290140409
Patchamatla, J. R. R., and Emani, P. K. (2020). Time domain implementation of transmitting boundaries in ABAQUS for discrete soil-structure interaction systems. International Journal of Mathematical, Engineering and Management Sciences, 5(3), 447.
Patchamatla, J. R. R., and Emani, P. K. (2022). Time domain implementation of consistent boundaries for continuum two-dimensional wave propagation problems using ABAQUS user-defined elements. International Journal of Mathematical, Engineering and Management Sciences, 7(2), 196.
Pepe, M., Sangirardi, M., Reccia, E., Pingaro, M., Trovalusci, P., and De Felice, G. (2020). Discrete and Continuous Approaches for the Failure Analysis of Masonry Structures Subjected to Settlements. Frontiers in Built Environment, 6, 43. https://www.frontiersin.org/articles/10.3389/fbuil.2020.00043/full
Pratt, T. K., and Williams, R. (1981). Non-linear analysis of stick/slip motion. Journal of sound and vibration, 74(4), 531–542. https://www.sciencedirect.com/science/article/abs/pii/0022460X8190417X
Biographies

Vinay Purohit did his Civil Engineering from the Graphic Era (Deemed to be University) of India in 2016. He completed his master degree in Structural Engineering from Uttarakhand Technical University in 2019. He is pursuing his PhD Degree from Graphic Era (Deemed to be) University. Presently Vinay Purohit is a Structural Engineer in Tehri Hydro Development Corporation India Limited (THDCIL), Rishikesh, Uttarakhand.

Pavan Kumar Emani did his civil engineering from the Nagarjuna University of India in 2001. He worked as Scientific Officer/Design Engineer in Bhabha Atomic Research Centre (BARC) till 2005, and later on completed his Ph. D from the Indian Institute of Technology Roorkee by 2009. Professor Emani has been teaching both under-graduate and post-graduate students of Civil Engineering since 13 years. Dr. Emani co-authored more than 30 research papers. Dr. Emani also received the Homi Bhabha Award in BARC. Dr. Emani is a life member of the Indian Society of Earthquake Technology (ISET), Institute of Engineers India (IEI), Indian Concrete Institute (ICI). He carried out sponsored research Projects for the Department of Science and Technology and Department of Atomic Energy, Govt. of India. Presently, Dr. Pavan Kumar Emani, Ph. D (IITR), is a professor in the Department of Civil Engineering, Graphic Era (Deemed to be University), Dehradun, Uttarakhand, India, dr.emani.ce@geu.ac.in
Journal of Graphic Era University, Vol. 10_2, 181–194.
doi: 10.13052/jgeu0975-1416.1027
© 2022 River Publishers